Robotersimulation
Erster Schritt von der Idee zur Roboterzelle
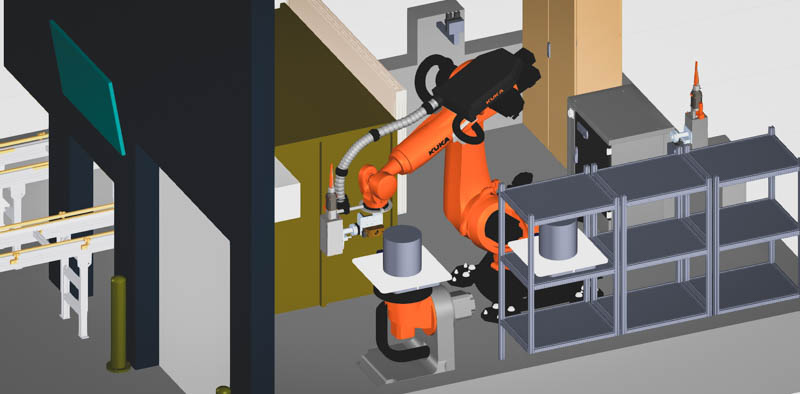
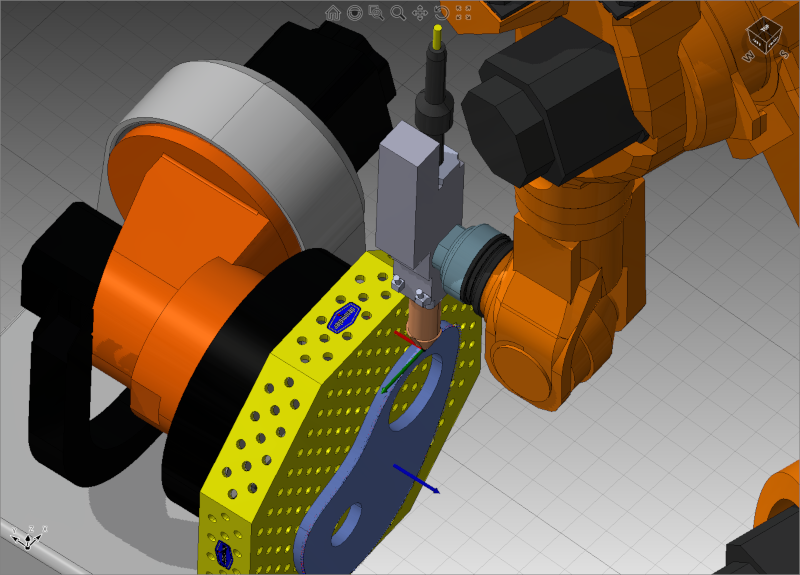
In der Robotersimulation wird die vorgesehene Roboteranwendung erstmals von der Idee durch 3D-Modellierung der Roboterzelle zum Leben erweckt. Virtuell bewegt sich der Roboter exakt wie in der späteren Umsetzung. Wichtige Erkenntnisse hinsichtlich Prozessablauf und zu beachtenden Randbedingungen wie Störkonturen werden bereits im frühen Stadium der Planung ersichtlich. Die Ergebnisse der Robotersimulation geben Aufschluss über die richtigen Komponenten sowie deren Anordnung und sind die wichtigste Informationsquelle für die Konstruktion der für die Prozessumsetzung benötigten Werkzeuge und Vorrichtungen.
Ziele der Robotersimulation
Als wichtige Planungsgrundlage können mit der Robotersimulation in frühen Projektphasen
- Erreichbarkeitsstudien durchgeführt,
- Machbarkeit des Prozesskonzepts plausibilisiert,
- Gestaltungsvarianten geprüft
- Konstruktionsfehler und Kollisionsmöglichkeiten aufgedeckt
- Layout sowie Flächenbedarf festgelegt und
- spätere Taktzeiten abgeschätzt werden
Wir nutzen unsere eigene 3D-OLP-Software Frame um Ihnen die besten Ergebnisse zu liefern!
Industrieroboter
Roboter kommen insbesondere überall dort zum Einsatz, wo hohe Geschwindigkeiten, wiederkehrenden Arbeitsabläufe und präzise Bewegungen gefordert werden. Darüberhinaus punkten Sie mit Ihrer hohen Flexibilität geänderte Anforderungen zu erfüllen und dabei kostengünstig in der Beschaffung zu sein. Häufig eignen sie sich daher besser als speziellen Kinematiken und Werkzeugmaschinen.
Wir bieten Ihnen alle beratenden, vorbereitenden und begleitenden Schritte für die Umsetzung Ihrer Industrieautomation rund um das Thema Industrieroboter an.
Bauarten
- Vertikalknickarmroboter (klassische Industrieroboter)
- Cobots
- Deltaroboter
- SCARA-Roboter
- Hexapods
- Kartesische Roboter
- Parallele und serielle Kinematik im Allgemeinen

unterstützte Roboterhersteller
- KUKA
- ABB
- Reis Roboter
- Stäubli
- Fanuc
- Yaskawa
- Mitsubishi
- Universal Robots
- und weitere