Roboterprogrammierung
Offline-Programmierung (OLP)
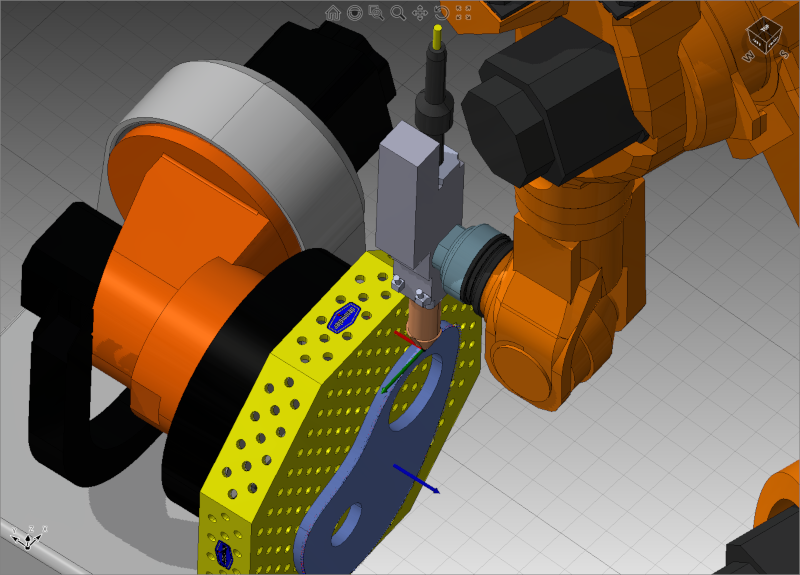
Programmierung in der virtuellen Roboterzelle
Die Offline-Programmierung dient dazu den gesamten Bewegungsablauf an einem separaten Rechner zu erzeugen und in konkrete Roboterprogramme zu überführen, ohne dass der Programmierer an die Robotersteuerung oder dem Roboter selbst tätig werden muss. Anhand der Konstruktionszeichnungen wird der Roboter, dessen Werkzeug, die zu bearbeitenden Werkstücke und die Umgebung in 3D abgebildet, um anschließend die genauen Bewegungspfade zu definieren. Das fertige offline generierte Programm lässt sich direkt an die Robotersteuerung übertragen und kann danach sofort ausgeführt werden.
Risiken und Stillstände vermeiden
Noch in der Planungs- oder Realisierungsphase befindliche Anlagen können so virtuell geprüft und die Inbetriebnahme verkürzt werden. Insbesondere bei Mehrroboteranlagen kann das reibungs- und kollisionslose Zusammenspiel sichergestellt werden. Auch für bestehende Anlagen bietet Offline-Programmierung entscheidende Vorteile, wenn während des Produktionsbetriebs Taktzeitoptimierungen und geänderte Prozessabläufe ausgearbeitet und ohne lange Stillstandszeiten übertragen werden können.
Wir nutzen unsere eigene 3D-OLP-Software Frame um Ihnen die besten Ergebnisse zu liefern!
Online-Programmierung (Teachen)
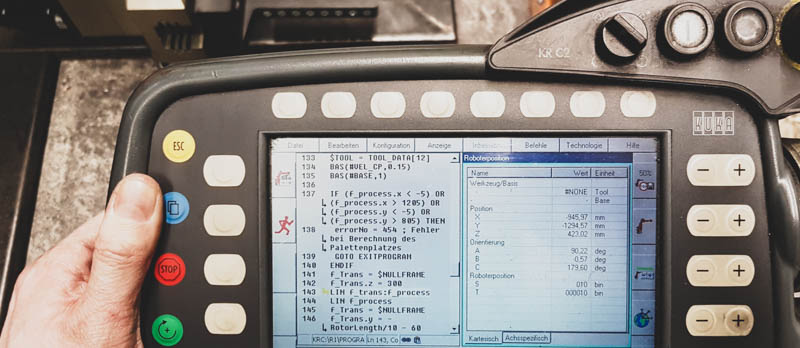
Programmerstellung vor Ort
Beim Teachen verfährt der Programmierer den Roboter auf diskrete Positionen direkt vor Ort an der Anlage und “lernt” ihn damit an. Sukzessive entsteht das gewünschte Roboterprogramm. Hierbei ist der Vorteil, dass ohne Vorbereitung begonnen werden kann. Gerade bei komplexeren Bewegungsabläufen insbesonderer bei genauen Konturfahrten kann dieses Verfahren jedoch zeitintensiv sein.
Teachen als letzter Schliff
Während der Montage der Roboterzelle ergeben sich üblicherweise geringe Abweichungen zwischen geplanter und tatsächlicher räumlicher Anordnung der einzelnen Komponenten. Selbst sorgsam erstelltes Offline-Programme können diese Ungenauigkeiten nicht berücksichtigen. Daher müssen nach Montage der Anlage die Werkzeuge und wichtige Punkt eingemessen oder nachgeteacht werden. Glücklicherweise hält sich der zeitliche Aufwand hierfür stark in Grenzen.
Wir sind spezialisiert auf Roboter von KUKA mit KRC1, KRC2, KRC4-Steuerung, sowie auf Reis Roboter mit Robotstar IV und Robotstar V-Steuerung.
Weitere Roboterhersteller auf Anfrage.
Industrieroboter
Roboter kommen insbesondere überall dort zum Einsatz, wo hohe Geschwindigkeiten, wiederkehrenden Arbeitsabläufe und präzise Bewegungen gefordert werden. Darüberhinaus punkten Sie mit Ihrer hohen Flexibilität geänderte Anforderungen zu erfüllen und dabei kostengünstig in der Beschaffung zu sein. Häufig eignen sie sich daher besser als speziellen Kinematiken und Werkzeugmaschinen.
Wir bieten Ihnen alle beratenden, vorbereitenden und begleitenden Schritte für die Umsetzung Ihrer Industrieautomation rund um das Thema Industrieroboter an.
Bauarten
- Vertikalknickarmroboter (klassische Industrieroboter)
- Cobots
- Deltaroboter
- SCARA-Roboter
- Hexapods
- Kartesische Roboter
- Parallele und serielle Kinematik im Allgemeinen
