Positionierer für Roboteranlagen
Einsatz und Arten von Positionierern
Bei der Bearbeitung von rotationssymmetrischen Bauteilen mit Robotern kommen typischerweise Positionierer zum Einsatz. Doch es gibt darüber hinaus viele weitere Anwendungsfälle, in denen Positionierer sinnvoll sind. Etwa wenn die Reichweite des Roboters nicht ausreicht oder wenn in Schweißanwendungen nur in bestimmten Lagen geschweißt werden darf. Für solche Einsatzzwecke werden keine Drehtische, also Positionierer bestehend aus einer Drehachsen, benötigt, sondern mehrachsige Positionierer, die auch über Schwenk- bzw. Kippachsen verfügen.
Durch die Integration in die Robotersteuerung werden die Positionierer als Zusatzachsen in das kinematische Modell des Roboters eingebunden und lassen so komplexe Bearbeitungsschritte, wie das Laserauftragsschweißen auf Turbinenschaufeln oder Turboverdichterrädern zu.
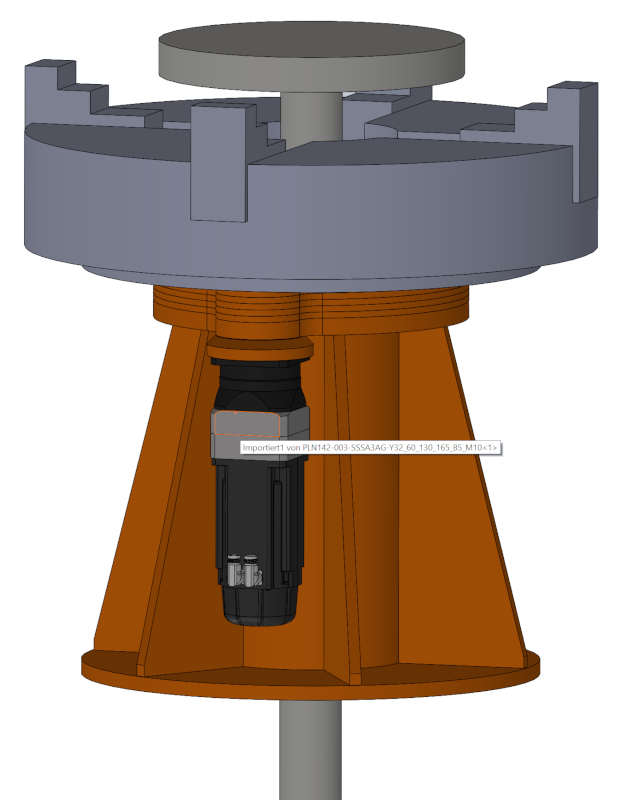
Drehtisch mit Hohlwelle für lange Werkstücke
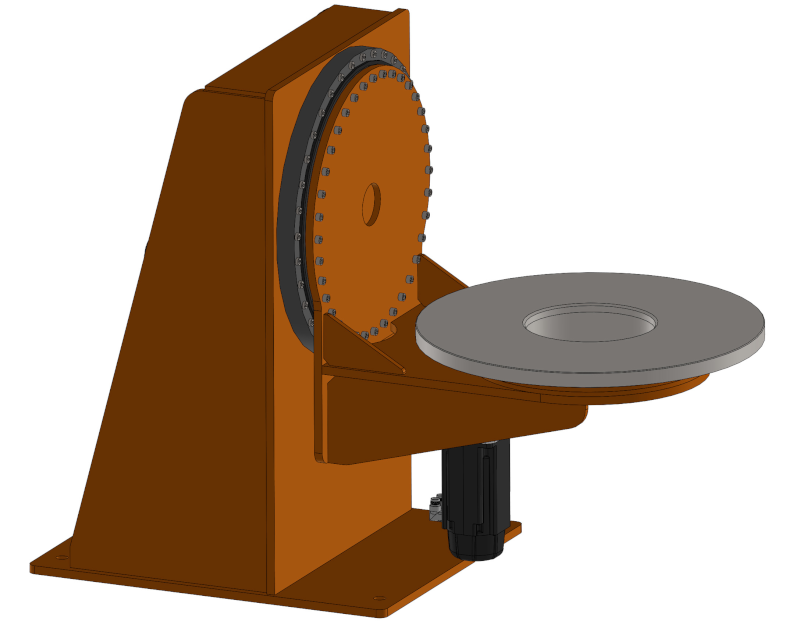
Dreh-Kipp-Tisch
Für Ihren Einsatzzweck liefern wir den passenden Positionierer
- Leistungsdaten nach Vorgaben
- benötigte Freiheitsgrade
- Validierung der Konstruktion durch Robotersimulation
- Montage vor Ort
- Integration in Ihre Robotersteuerung
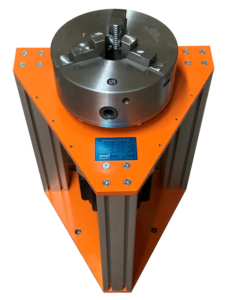
Drehpositionierer für KUKA-Roboteranlage
Technische Daten Drehtisch
0-180 U/min
Drehzahl
500 kg
Traglast
192 NM
Nenn-Drehmoment
max. 3 kgm²
Trägheitsmoment Bauteil
< 3 arcmin
Positioniergenauigkeit
70 kg
Gewicht
550 MM
Höhe
400 x 400 mm
Standfläche
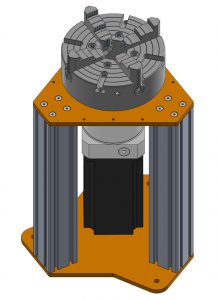
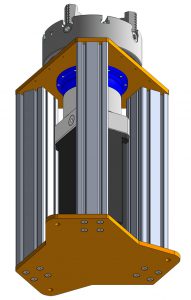
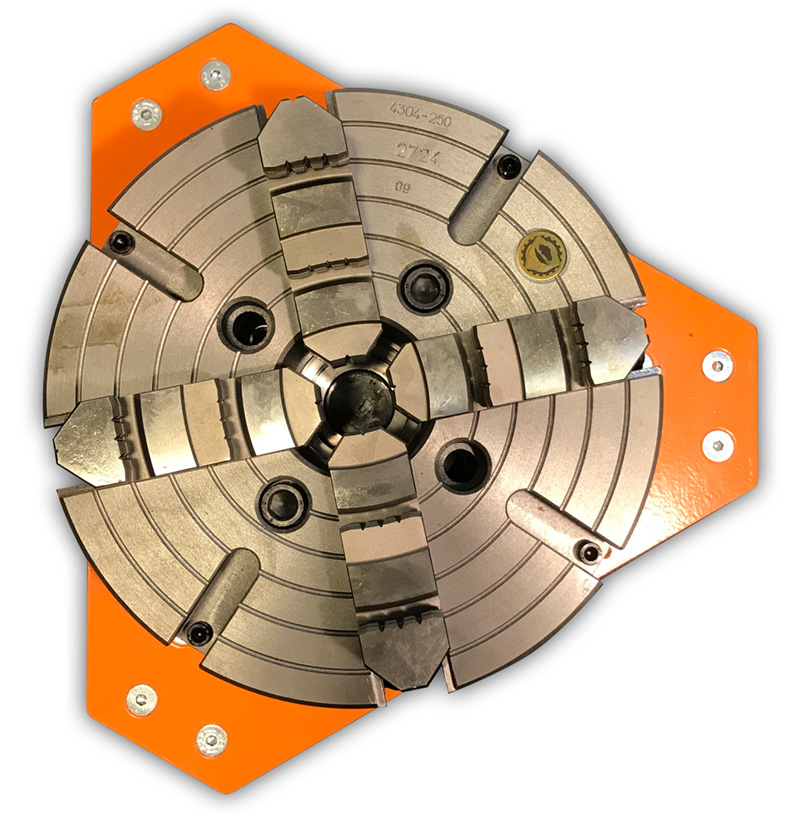
Technische Daten Planscheibe
5 – 250 mm
Spanndurchmesser
Wechselbar + T-Nuten
Spannbacken