Wer sind unsere Kunden?












Einblick in unsere Projekte
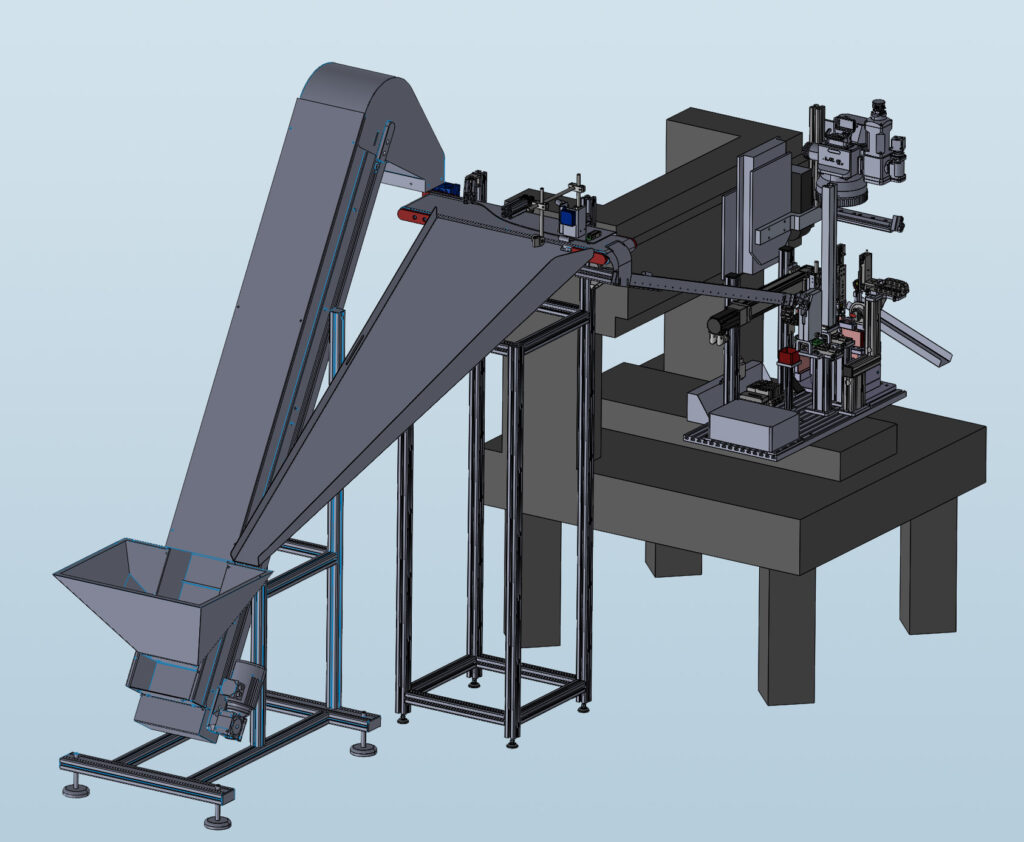
Maschinenbestückung einer Laserschweißanlage
Zuführung ungeordneter Rohteile für einen Laserschweißprozess mit integrierter Inline-Messung per Lasertriangulation zur Prüfung der Bauteiltoleranz sowie Vision-System mit smarter Kamera für die Merkmals- und Anwesenheitskontrolle.
Video ansehen
Maschinenbestückung
Roboterbasierte Bestückung mehrerer verketteter Maschinen mit flexibel parametrierbaren Werkstücken in einer Gießerei.

Mobile Straßenbelagsprüfung
Integration eines Industrieroboters in einen Kleintransporter zur Handhabung eines Messwerkzeugs für Straßenbeläge.

Modernisierung einer CNC-Werkzeugmaschine
Komplette Erneuerung der CNC-Steuerung einer Hochpräzisionswerkzeugmaschine mitsamt der Integration der angeschlossenen Peripherie, unter anderem einer Laserquelle.

Sprühsystem für Vertikaldruckgießprozess
Roboterzelle für einen teilautomatisierten Prozess an einer Vertikaldruckgießmaschine. Mensch-Roboter-Kollaboration durch gemeinsamen Arbeitsraum an der Gießkammer.
Video ansehen
Versuchsanlage für das thermische Spritzen
Einrichtung einer preisbewussten Versuchsanlage für einen neuartigen Prozess mittels thermischen Spritzens durch Einsatz eines Gebrauchtroboters und Nutzung des schnellen avail RP-180-500 Drehpositionierers.
Video ansehen
Retrofit Folienschneidemaschine
Austausch der Maschinensteuerung und Produktivitätssteigerung durch Ablaufoptimierung sowie nachträgliche Ertüchtigung der Maschinensicherheit.
Video ansehen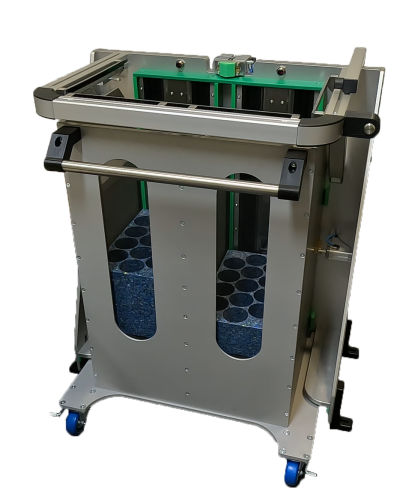
Trolley Feeder
Der Trolley Feeder bietet die Möglichkeit, Rohteile automatisierungsgerecht für die Bearbeitung bereitzustellen.
Video ansehen